About the Project
Although Jordan is the third most water-scarce country in the world, irrigation in agriculture just takes the simple “brute force” approach with excessive and wasteful flooding of crops. There is also no sensing or automation to take into account the unique requirements of different vegetables, soil, land, etc. However, one solution is micro-irrigation. It has two important advantages: (i) saving valuable water resources, and (ii) improving agricultural output by efficiently targeting irrigation to both crops and soil within small geographical areas. Now, unlike indoor micro-irrigation, there are new technical challenges which to be addressed within this project. So, we require real-time wireless sensing of localized soil sensor data (e.g., humidity, etc.) to monitor and control micro irrigation. Rather than building an expensive and complicated wireless sensor network (WSN) in a remote drought region, we propose to employ a small number of low cost, lightweight drones using simple energy-saving backscatter technology to harvest humidity data from energy-efficient soil sensors.
To ensure full coverage, the drones need to be wirelessly interconnected in an ad-hoc networked manner. Higher-level algorithms will ensure that trade-offs between the power, coverage, preferred trajectories and blockages are optimally managed. As either a centralized or distributed solution we require updated sensor readings in real-time to (algorithmically) estimate the best positions for active drones or the optimal landing spots for inactive ones. Such a dynamic topology will keep all parameters monitored/processed within a ground command and control node powered via renewable energy. The drones will be controlled via autopilots and the lack of processing, memory and power resources on board such devices means designing the computationally intensive aspects of the project to run on the green-powered centralized command and control node. This will ensure a fully scalable yet responsive solution to efficient micro-irrigation.
Main Objectives
- To demonstrate the concept of real-time micro-irrigation for farms in dry areas in Jordan using drone-assisted wireless sensor networks that can lead to future patents and commercialization. This can be achieved via developing a full stack platform based on backscatter IoT sensor nodes that are connected to a centralized server across drone-based hubs and gateways.
- To communicate, engage, and promote these results to Jordan’s governmental organizations such as the ministry of water and irrigation and the ministry of agriculture. Both will be particularly concerned with possible future developments and the deployment of this irrigation technology.
- To analyze how this technology will improve agricultural output and provide water stocks, which in turn will result in a business case that attracts public and private investment in the future.
Project collaborators
Organized by the Hashemite Univeristy and the University of Leeds.

Project leader: Dr. Ali Hayajneh
The Hashemite Universtiy
University of Leeds

Dr. Mohamamd Hayajneh
Assistant Dean, Engineering faculty, HU

Dr. Ashraf Ali
The Hashemite Universtiy

Des McLernon
The University of Leeds

Prof. Mohammad Amin Jarrah
MARS Robotics

Syed Ali Raza Zaidi
The University of Leeds
Publications
Here are some publications
Performance Analysis of Drone Assisted Multiple Antenna Backscatter IoT Sensor Network
Abstract: In this paper, we investigate the idea of drone-assisted multiple antenna ambient backscatter communication (AmBC) based internet of things (IoT) sensor network (SN). We consider a scenario where a drone is used to collect the data from distributed multiple antenna SNs at which the drone is working as an ambient power emitter and a reader. The sensor nodes passively modulate the transmitted pure carrier by implementing load impedance modulation which results in an amplitude shift keying modulation. In order to quantify the performance of the studied network, we aim to find a closed-form expression for the coverage probability for the AmBC double-Rayleigh dyadic fading channel. Our model also incorporates Line of Sight (LoS) and Non-LoS (NLoS) propagation states for accurately modeling large-scale path-loss between drone and SN. We also investigate the use of the method of the moments in finding the probability density function (PDF) for the overall fading channel by matching it to a Log-Normal distribution to ease the mathematical manipulations. Finally, numerical results are compared to Monte-Carlo simulations to verify the effectiveness of the derived system model analysis and to characterize the optimal selection of the network parameters in maximizing the coverage probability.
Authors: Ali M Hayajneh, Haitham Al-Obiedollah, Haythem Bany Salameh, Massimo Merenda, Sofyan M Hayajneh, Syed Ali Raza Zaidi, Des C McLernon
On The Performance of Multi-Carrier SDMA-NOMA CR-Based Systems
Abstract: Recently, several multiple access (MA) have been proposed to support the massive connectivity of the cognitive radio (CR) internet-of-things IoT-based networks. Among these MA techniques, the combination of spatial domain multiple access (SDMA) and non-orthogonal multiple access (NOMA), namely SDMA-NOMA, shows a potential capability to meet the unprecedented massive connectivity requirements. With this SDMA-NOMA approach, both spatial and power domains offered by NOMA and SDMA, respectively, are utilized together to serve the secondary users (SUs) in CR networks. To further increase the number of connected SUs, a multi-carrier SDMA-NOMA CR-based system is considered in this paper. With this approach, the available bandwidth of transmission is divided into a set of sub-channels, in which an SDMA-NOMA CR-based transmission is utilized. To explore the benefits of this multi-carrier SDMA-NOMA system over the existing conventional MA techniques, a power minimization (P-Min) problem is formulated. With this P-Min problem, the total transmit power is minimized subject to achieve a set of quality-of-service (QoS) constraints. Simulation results show that the proposed multi-carrier SDMA-NOMA CR system outperforms the conventional approaches in terms of the total required power for transmission.
Authors: Haitham Al-Obiedollah, Ali Hayajneh, Haythem Bany Salameh, Kanapathippillai Cumanan and Ahmad M.Y. Al-Nimrat
Nearest neighbour methods and their applications in design of 5G & beyond wireless networks
Abstract: In this paper, we present an overview of Nearest neighbour (NN) methods, which are frequently employed for solving classification problems using supervised learning. The article concisely introduces the theoretical background, algorithmic, and implementation aspects along with the key applications. From an application standpoint, this article explores the challenges related to the 5G and beyond wireless networks which can be solved using NN classification techniques.
Authors: Syed Ali Raza Zaidi
Simulation of Trajectory Tracking and Motion Coordination for Heterogeneous Multi-Robots System
Abstract: The paper addresses developing a team of aerial and ground robots to accomplish multi-robot system navigation task in an accessible way. The motions of two different robotic structures, namely quadcopter, and differential drive mobile robots are simulated and controlled. Two-level controller has been adopted for the multi-robot system. A low-level controller is utilized for each robotic platform to insure its motion stability and robustness. Then, a formulation of high-level tracking controller is presented to allow each robot to avoid obstacles in a dynamic environment and to organize its motion with other flying/ground robots. The performance of the proposed system is demonstrated in a simulation environment. A modeling platform is adopted to construct the simulation environment, which allows the user to easily adjust the models and controller parameters as well as to implement different control algorithms. In addition, the simulation environment helps in analyzing the obtained results and performing several tasks in different conditions. The real-time motion of multi-robot system is monitored in the created environment that provides three-dimensional graphical displays of the robotic platforms. Simulation results show that the aerial and ground robots produced trajectories individually to reach different targets. Meanwhile, each robot in the system was able to navigate among obstacles without colliding with other agents in the network.
Authors: Samer Mutawe, Mohammad Hayajneh, Suleiman BaniHani, Mohammad Al Qaderi
Unlocking Edge Intelligence through Tiny Machine Learning (TinyML)
Abstract: Machine Learning (ML) on the edge is key for enabling a new breed of IoT and autonomous system applications. The departure from the traditional cloud-centric architecture means that new deployments can be more power-efficient, provide better privacy and reduced latency for inference. At the core of this paradigm is TinyML, a framework allowing the execution of ML models on low-power embedded devices. TinyML allows importing pre-trained ML models on the edge for providing ML-as-a-Service (MLaaS) to IoT devices. This article presents a comprehensive overview of Tiny MLaaS (TMLaaS) architecture. The TMLaaS architecture inherently presents several design trade-offs in terms of energy consumption, security, privacy, and latency.We also present how TMLaaS architecture can be implemented, deployed, and maintained for large scale IoT deployment. The feasibility of implementation for the TMLaaS architecture has been demonstrated with the help of a case study.
Authors: Syed A. R. Zaidi; Ali M. Hayajneh; M. Hafeez; Q. Ahmed
Guidance, Navigation and Control System for Multi-Robot Network in Monitoring and Inspection Operations
Abstract: This work focuses on the challenges associated with autonomous robot guidance, navigation, and control in multi-robot systems. This study provides an affordable solution by utilizing a group of small unmanned ground vehicles and quadrotors that collaborate on monitoring and inspection missions. The proposed system utilizes a potential fields path planning algorithm to allow a robot to track a moving target while avoiding obstacles in a dynamic environment. To achieve the required performance and provide robust tracking against wind disturbances, a backstepping controller is used to solve the essential stability problem and ensure that each robot follows the specified path asymptotically. Furthermore, the performance is also compared with a proportional-integral-derivative (PID) controller to ensure the superiority of the control system. The system combines a low-cost inertial measurement unit (IMU), a GNSS receiver, and a barometer for UAVs to generate a navigation solution (position, velocity, and attitude estimations), which is then used in the guidance and control algorithms. A similar solution is used for UGVs by integrating the IMU, a GNSS receiver, and encoders. Non-linear complementary filters integrate the measurements in the navigation system to produce high bandwidth estimates of the state of each robotic platform. Experimental results of several scenarios are discussed to prove the effectiveness of the approach.
Authors: Mohammad Hayajneh, Ahmad Al Mahasneh
An Efficient Scheme for Data Pattern Matching in IoT Networks
The Internet has become an unavoidable trend of all things due to the rapid growth of networking technology, smart home technology encompasses a variety of sectors, including intelligent transportation, allowing users to communicate with anybody or any device at any time and from anywhere. However, most things are different now. Background: Structured data is a form of separated storage that slows down the rate at which everything is connected. Data pattern matching is commonly used in data connectivity and can help with the issues mentioned above. Aim: The present pattern matching system is ineffective due to the heterogeneity and rapid expansion of large IoT data. The method requires a lot of manual work and has a poor match with real-world applications. In the modern IoT context, solving the challenge of automatic pattern matching is complex. Methodology: A three-layer mapping matching is proposed for heterogeneous data from the IoT, and a hierarchical pattern matching technique. The feature classification matching, relational feature clustering matching, and mixed element matching are all examples of feature classification matching. Through layer-by-layer matching, the algorithm gradually narrows the matching space, improving matching quality, reducing the number of matching between components and the degree of manual participation, and producing a better automatic mode matching. Results: The algorithm’s efficiency and performance are tested using a large number of data samples, and the results show that the technique is practical and effective. Conclusion: the proposed algorithm utilizes the instance information of the data pattern. It deploys three-layer mapping matching approach and mixed element matching and realizes the automatic pattern matching of heterogeneous data which reduces the matching space between elements in complex patterns. It improves the efficiency and accuracy of automatic matching.
Authors: Ashraf Ali and Omar A. Saraereh
Channel State Information based Device Free Wireless Sensing for IoT Devices Employing TinyML
The channel state information (CSI) of the sub-carriers employed in orthogonal frequency division multiplexing (OFDM) systems has been employed traditionally for channel equalisation. However, the CSI intrinsically is a signature of the operational RF environment and can serve as a proxy for certain activities in the operational environment. For instance, the CSI gets influenced by scatterers and therefore can be an indicator of how many scatterers or if there are mobile scatterers etc. The mapping between the activities whose signature CSI encodes and the raw data is not deterministic. Nevertheless, machine learning (ML) based approaches can provide a reliable classification for patterns of life. Most of these approaches have only been implemented in lab environments. This is mainly because the hardware requirements for capturing CSI, processing it and performing signal-processing algorithms are too complex to be implemented in commercial devices. The increased proliferation of IoT sensors and the development of edge-based ML capabilities using the TinyML framework opens up possibilities for the implementation of these techniques at scale on commercial devices. Using RF signature instead of more invasive methods e.g. cameras or wearable devices provide ease of deployment, intrinsic privacy and better usability. The design space of device-free wireless sensing (DFWS) is complex and involves device, firmware and ML considerations. In this article, we present a comprehensive overview and key considerations for the implementation of such solutions. We also demonstrate the viability of these approaches using a simple case study.
Authors: Ali M. Hayajneh; Sami Aldalahmeh; Syed Ali R. Zaidi; Des McLernon; Haitham Obeidollah; Rashed Alsakarnah
Decentralized Federated Learning over Slotted ALOHA Wireless Mesh Networking
Federated Learning (FL) presents a mechanism to allow decentralized training for machine learning (ML) models inherently enabling privacy preservation. The classical FL is implemented as a client-server system, which is known as Centralised Federated Learning (CFL). There are challenges inherent in CFL since all participants need to interact with a central server resulting in a potential communication bottleneck and a single point of failure. In addition, it is difficult to have a central server in some scenarios due to the implementation cost and complexity. This study aims to use Decentralised Federated learning (DFL) without a central server through one-hop neighbors. Such collaboration depends on the dynamics of communication networks, e.g., the topology of the network, the MAC protocol, and both large-scale and small-scale fading on links. In this paper, we employ stochastic geometry to model these dynamics explicitly, allowing us to quantify the performance of the DFL. The core objective is to achieve better classification without sacrificing privacy while accommodating for networking dynamics. In this paper, we are interested in how such topologies impact the performance of ML when deployed in practice. The proposed system is trained on a well-known MINST dataset for benchmarking, which contains labelled data samples of 60K images each with a size 28×28 pixels, and 1000 random samples of this MNIST dataset are assigned for each participant’ device. The participants' devices implement a CNN model as a classifier model. To evaluate the performance of the model, a number of participants are randomly selected from the network. Due to randomness in the communication process, these participants interact with the random number of nodes in the neighborhood to exchange model parameters which are subsequently used to update the participants’ individual models. These participants connected successfully with a varying number of neighbours to exchange parameters and update their global models. The results show that the classification prediction system can achieve 95% accuracy using the three different model optimizers in the training settings (i.e., SGD, ADAM, and RMSprop optimizers). Consequently, the DFL over mesh networking shows more flexibility in IoT systems, which reduces the communication cost and increases the convergence speed which can outperform CFL.
Authors: Abdelaziz Salama; Achilleas Stergioulis; Ali M. Hayajneh; Syed Ali Raza Zaidi; Des McLernon; Ian Robertson
Graduation projects
Here are some publications
Backscattering Communication In Health Care Application
In this project, we built a backscatter sensor node with MSP430 MCU for health care applications. The sensor is built to be attached with a heart rate sensor and the data is to be sent to the reader node using the backscatter technique using RTL-SDR receiver and BladeRF X40 carrier transmitter. The ultimate goal of the project is to design an ultra-light low-cost backscatter enabled sensor node that can work for months without any replacement of the battery and even without a battery using RF power harvesting techniques like simultaneous wireless information and power transfer (SWIPT).
Team: Omar Ali Abu-Naja, Lana Salah Shamayleh, Osama Elaian Shufoot, Raya Jehad Al-Wahedy, Mohammad Khalee and Abaad Abd-Alrhaman Al-Khalayleh
Supervisor: Dr. Ali Hayajneh
Machine Learning on the Backscatter Edge IoT Devices
In this project, we aim to build an ML-enabled edge device using TinyML models for backscatter applications. We collect data using soil humidity sensors and do deep learning model learning on the cloud using the TensorFlow framework and compress models to be used on the edge devices. The framework is implemented on MSP430 embedded backscatter sensor node that is running Long short-term memory (LSTM) as an artificial recurrent neural network (RNN) architecture. The results were also used via transfer learning (TL) techniques to predict soil water content across multiple locations in Jordan with an average R2 determinant coefficient of 95%.
Team: Moammed Yasseen and Osama D. Haikal
Supervisor: Dr. Ali Hayajneh
Design of ML Enabled IoT Framework for Smart Agriculture
Soil moisture is one of the main factors in agricultural production and its accurate forecasting is important for the rational use and management of water resources. However, soil moisture involves complex structural properties and meteorological factors, and it is difficult to establish an ideal ML model to predict soil moisture. Therefore, in this project, we built an ML model using extreme gradient boosting to predict soil moisture values based on air temperature and air humidity so it can give an advantage for the smart irrigation system. First of all, we collect the data using a soil moisture sensor which is embedded in the ESP32 microcontroller then uploaded it to the firebase cloud. After that, we designed the machine learning model using regression algorithms. In this way, it is possible to know whether the soil needs to be irrigated or not, instead of consuming water more than needed depending on the predicted soil moisture values that were the output of the designed model.
Team: Yazeed Alkhalaileh, Asem Mugdadi, Adnan Abu Saqer and Abdelrahman Alshraiedeh
Supervisor: Dr. Ali Hayajneh
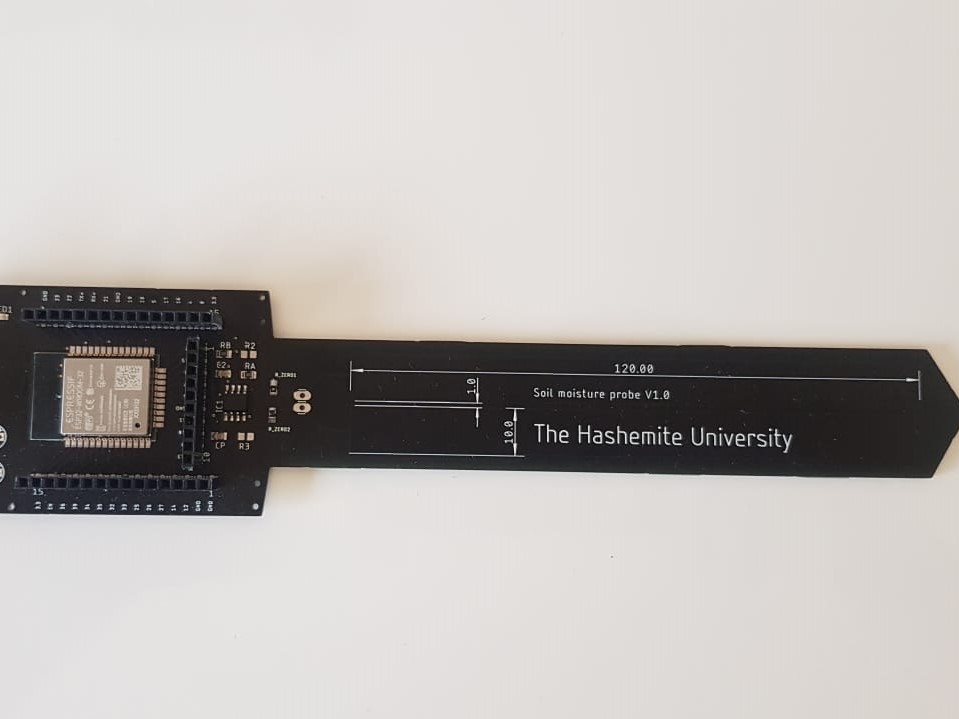
Design of soil moisture sensor for smart agriculture applications
In this project, we designed a soil moisture sensor that is WiFi-enabled for smart agriculture and irrigation applications. In the project, we designed a capacitive soil moisture sensor. The main sensor is a parallel plate capacitor that is calibrated by curve fitting to convert the capacitance of the sensor to a soil water content percentage. The soil sensor is enabled with WiFI connection through ESP32 chip and connected to a data collection server at which the soil humidity, air temperature, and air humidity can be analyzed to forecast future measurements. We built the sensor to be ML-ready and can be equipped with TinyML models.
Team: Mostafa AlKhatib, Mohammad AlAssi, Ramez Alotoom, Karam Hjazeen and Ammar Atawneh
Supervisor: Dr. Ali Hayajneh
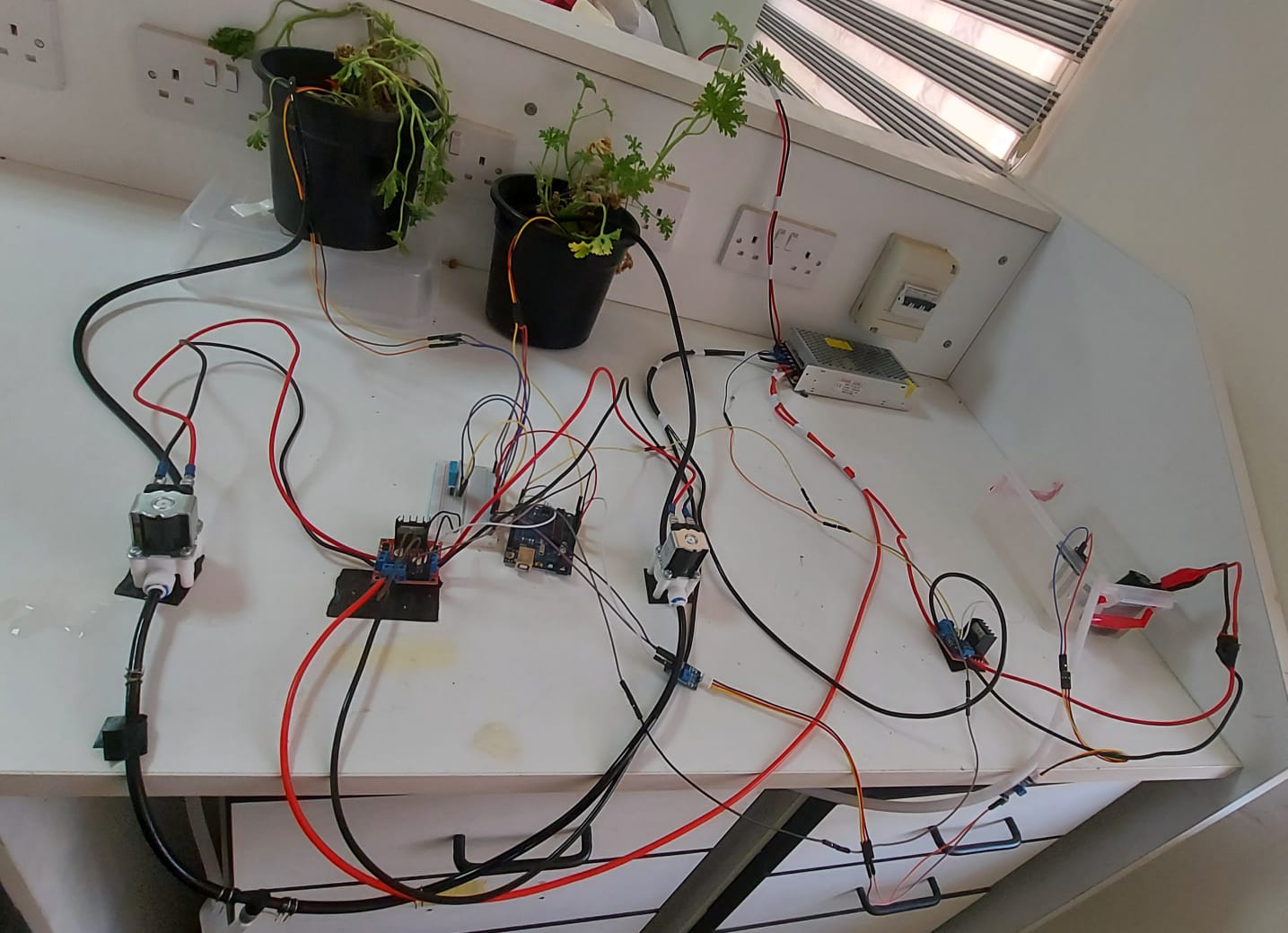
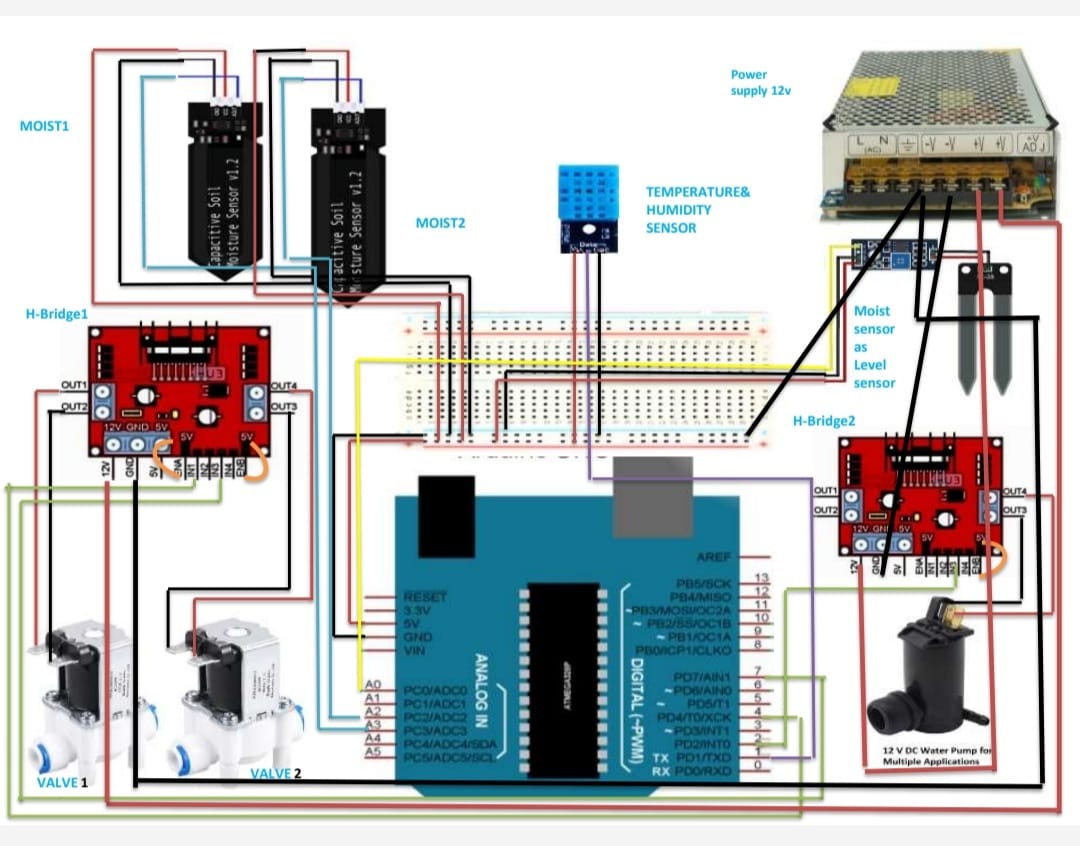
Automated Irrigation System for Smart Agriculture
This work focuses on the design and implementation of an automated irrigation system to be included in smart irrigation systems. The goal of this system is to reduce the amount of irrigation water required with efficient plant production in dry lands. A pump and solenoid valves that run on the instruction of a controller operate the irrigation system. In addition, the system includes calibrated sensors that collect information such as soil moisture and salinity as well as ambient temperature. This data is processed according to the environmental conditions surrounding the plant to pump the right amount of water at the right time.
Team: Dania Waleed Yamen, Islam Shafi ALQaisi and Shahed tal’at Qasem
Supervisor: Dr. Mohamamad Hayajneh
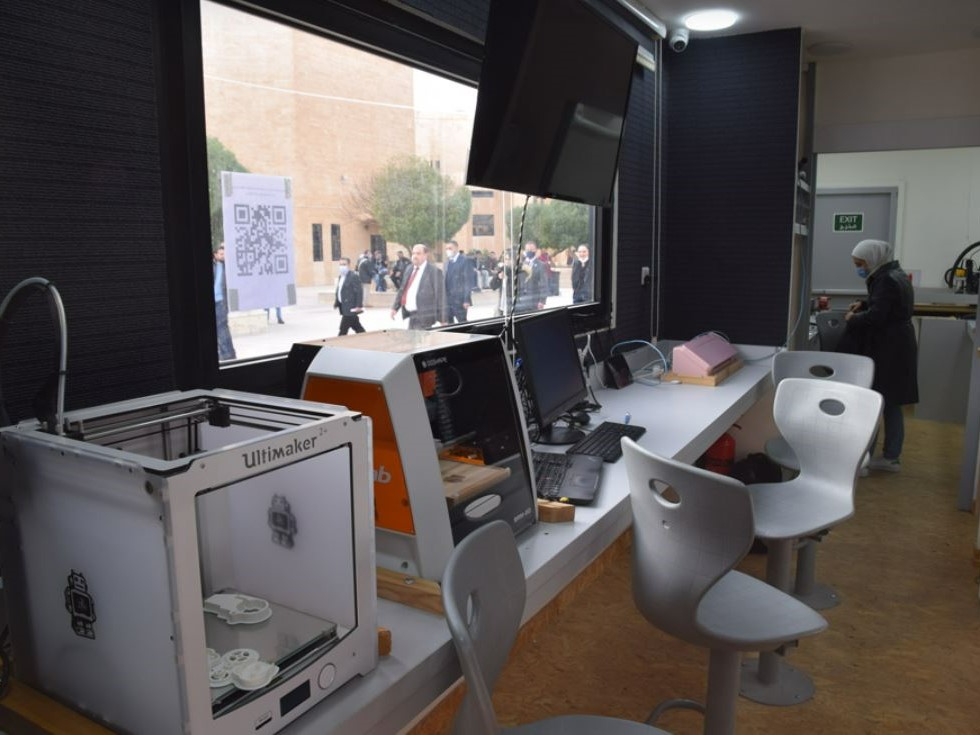
Project Venue
Project venue location info and gallery
Department of Electrical Engineering, The faculty of Engineering, The Hashemite Univeristy
The Faculty of Engineering was established in August 1998. The faculty offers undergraduate and graduate degrees in eight programs. The bachelor's degrees are in Architecture, Civil, Electrical, Industrial, Biomedical, Mechanical, Computer, and Mechatronics Engineering. The Master programs offered by the faculty are Mechanical and Civil Engineering, Energy Systems, Maintenance Management and Testing Technology. On 28 August 2018, the faculty fulfilled the criteria of Accreditation Board for Engineering and Technology (ABET).







Project prototypes
Here are some prototypes from the project
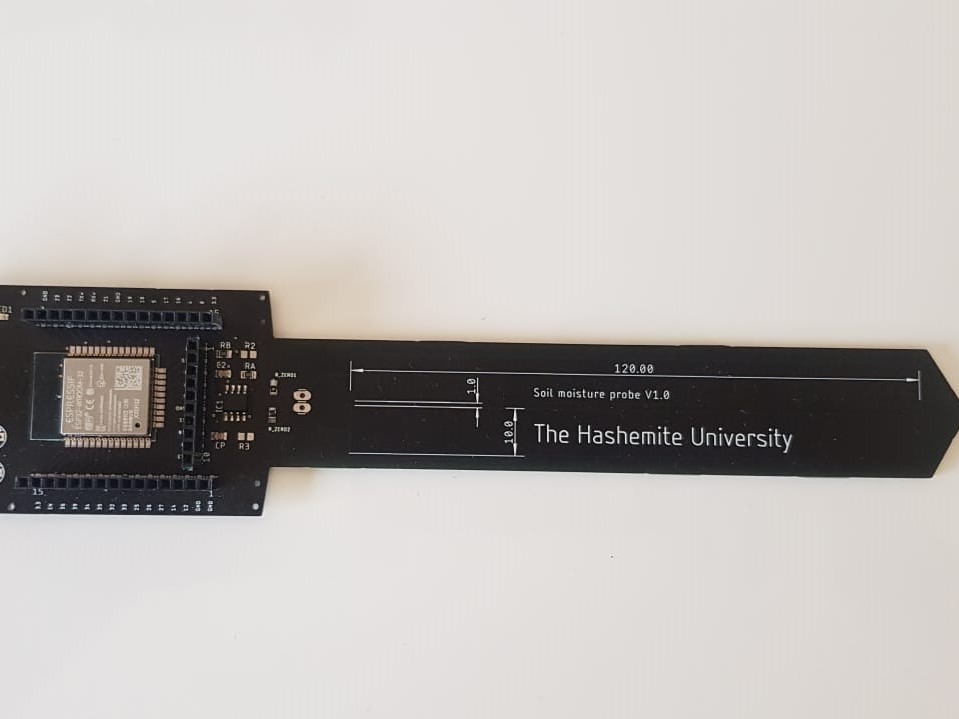
IoT Soil humidity sensor
A soil moisture sensor that is WiFi enabled through ESP32 chip. It is designed, calibrated, and assembled at the Hashemite University
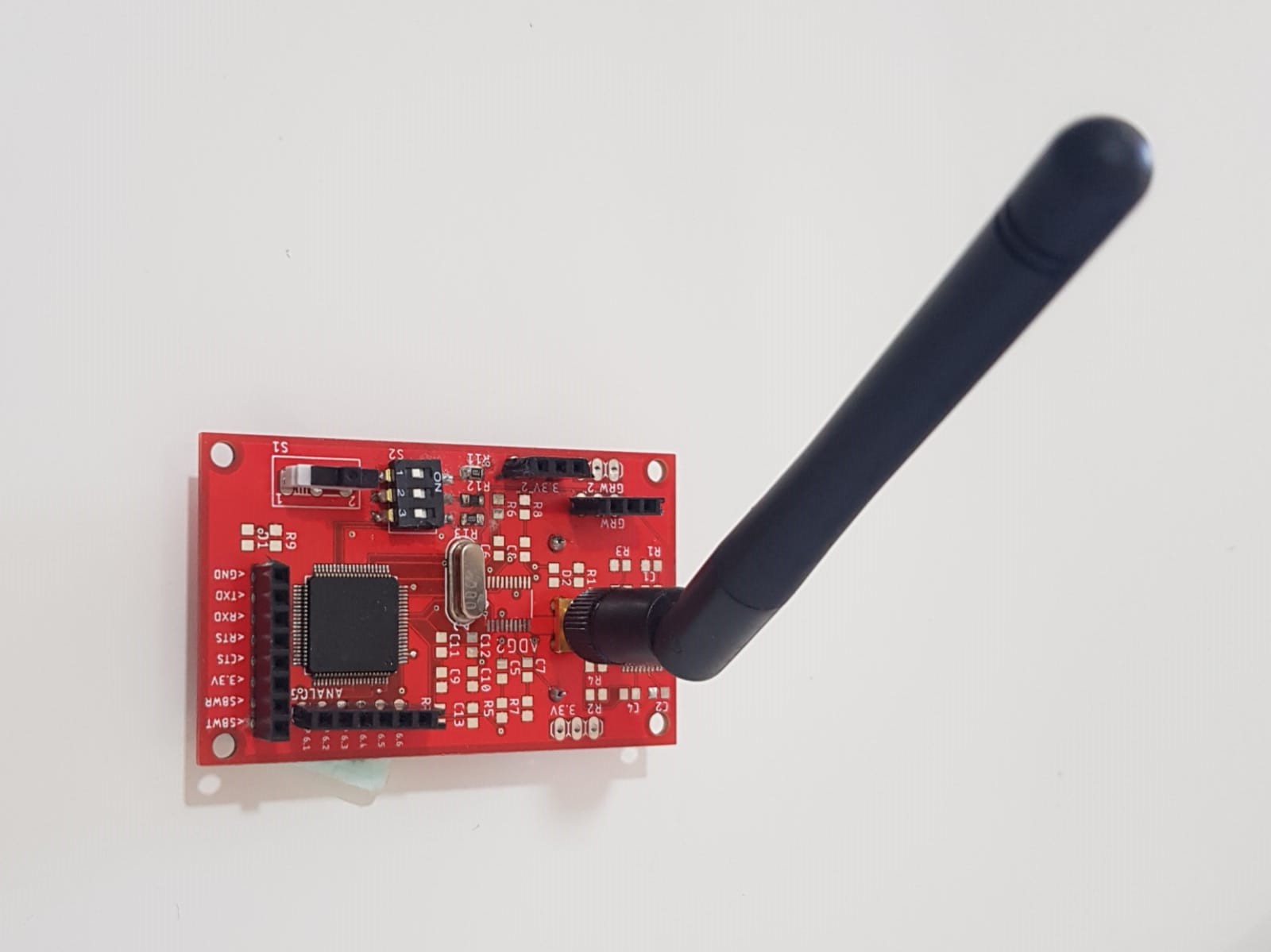
Backscatter IoT sensor node
A backscatter enabled wireless sensor node. A custom made design with MSP430 chip in board. A fully functional sensor board that can work for a year on a coin cell battery.

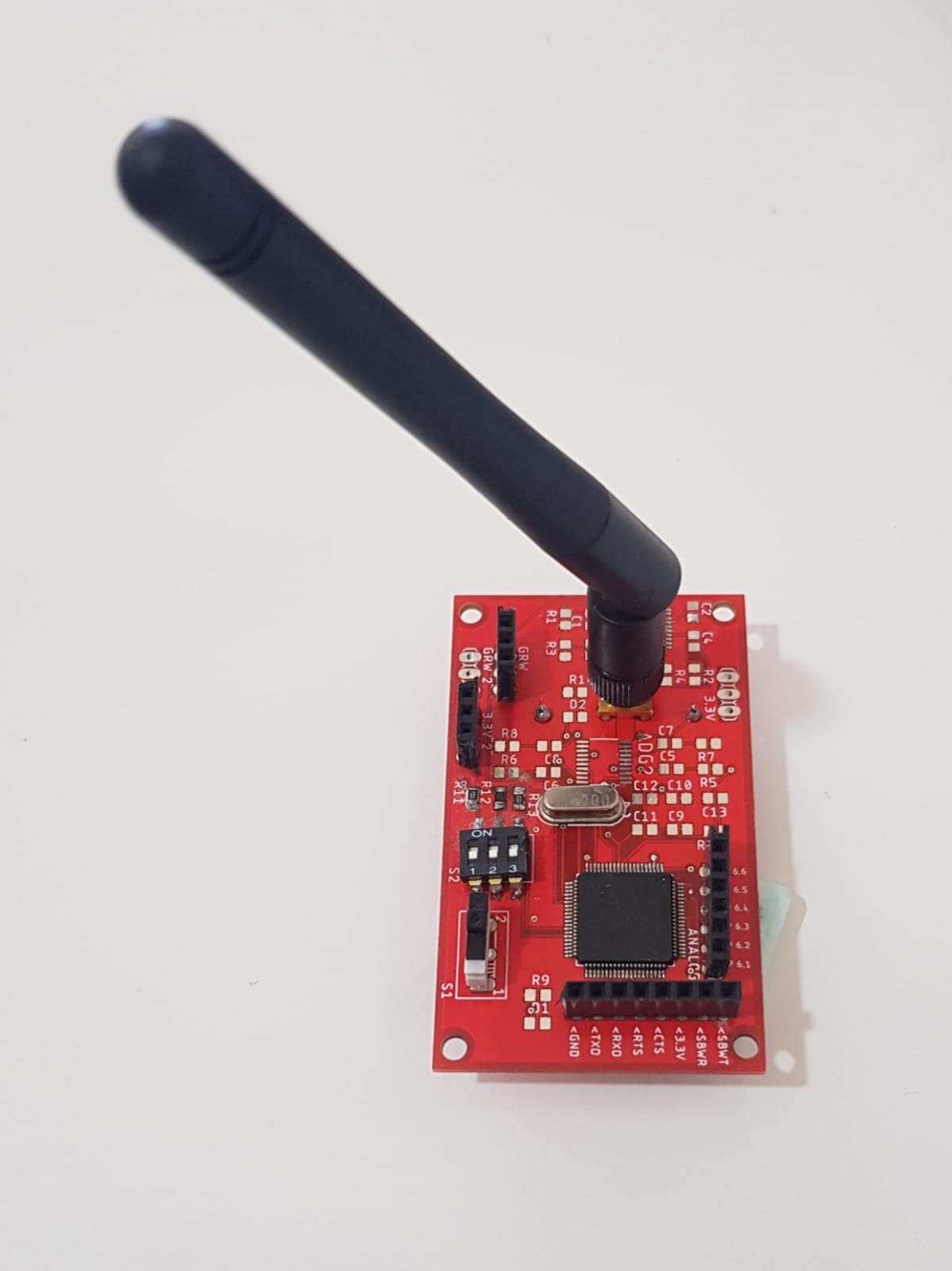
Backscatter IoT sensor node
A backscatter-enabled wireless sensor node. A custom-made design with ATTINY85 chip onboard. A fully functional sensor board that can work for a month on a coin cell battery. The sensor node can be equipped with any kind of sensors like temperature and UV sensor as shown in the figure.
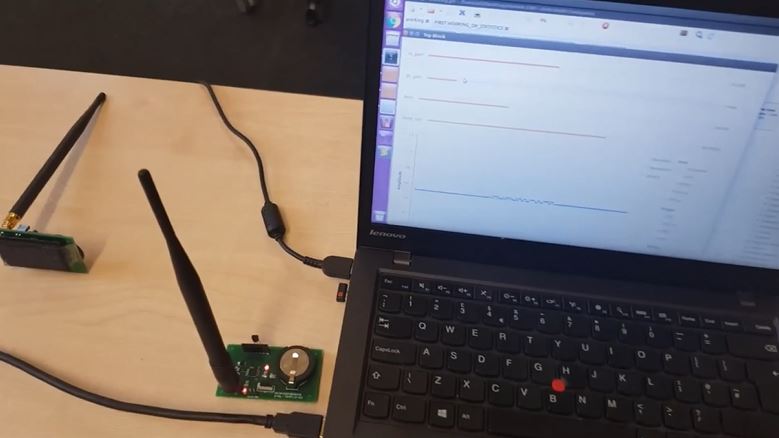
Full-stack backscatter enabled SDR-IoT framwork
Full stack backscatter sensor network. The network consists of a fully operational backscatter sensor node based on ambient backscatter communication and software defined radio (SDR).
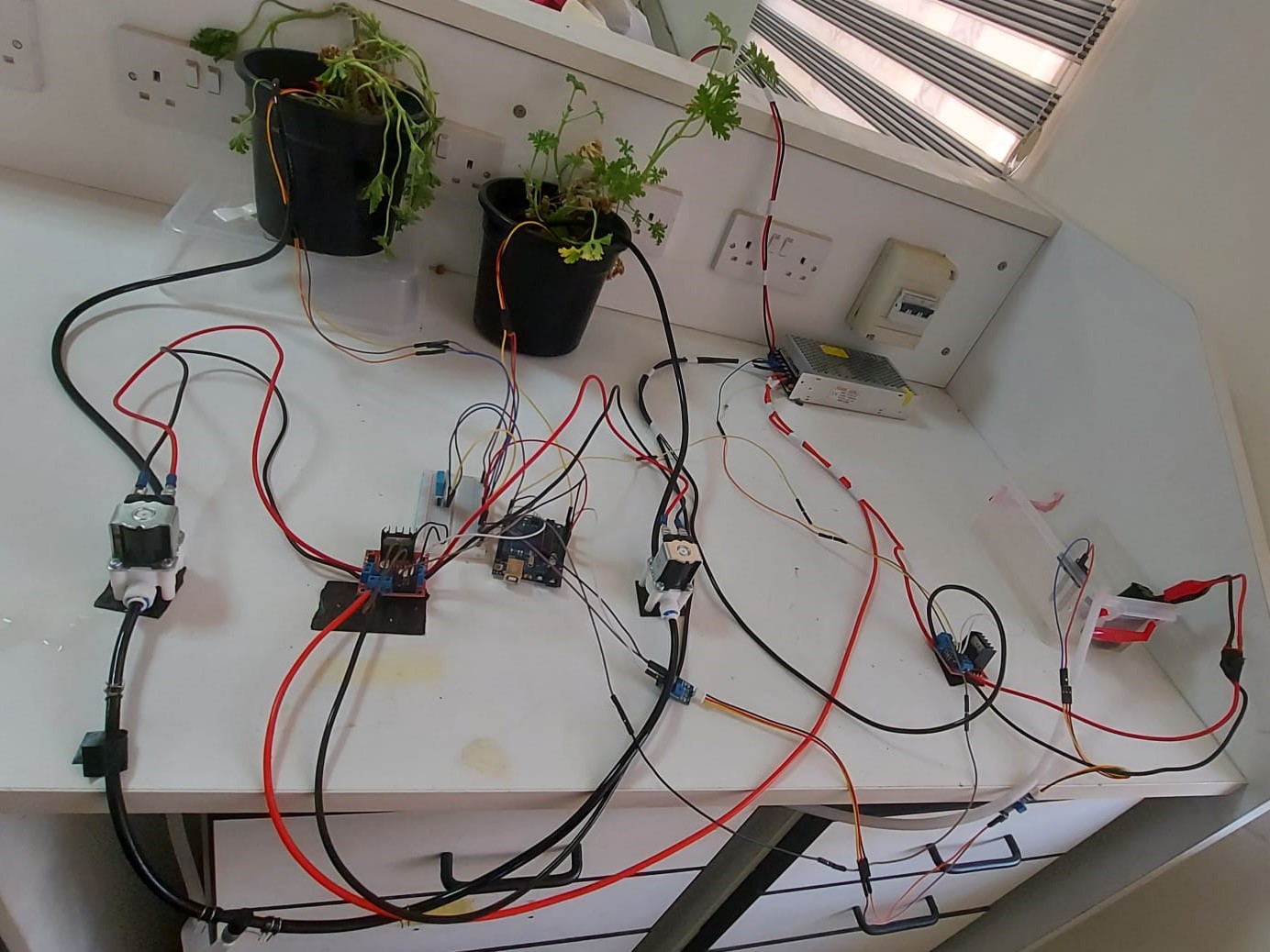
Full-stack smart irrigation system
The system includes calibrated sensors that collect information such as soil moisture and salinity as well as ambient temperature. This data is processed according to the environmental conditions surrounding the plant to pump the right amount of water at the right time.
Gallery
Check our gallery from the recent events and projects













Project videos
Autonomous drone flight at the Hashemite University
Full-stack implemntation of backscatter communciation using RTL-SDR + Gnuradio
Sponsors


Contact Us
You can contact Dr. Ali Hayajneh the project leader